TITLE: Pushing the Limits of Deep CNNs for Pedestrian Detection
AUTHER: Qichang Hu, Peng Wang, Chunhua Shen, Anton van den Hengel, Fatih Porikli
ASSOCIATION: The University of Adelaide, NICTA
FROM: arXiv:1603.04525
CONTRIBUTIONS
- An observation is obtained that fine-tuning a DCNN model using pedestrain data is critically important.
- Another observation is that proper bootstrapping is also of importance.
- An ensemble of boosted decision forests is trained using features from multiple layers, which brings effectiveness.
- Semantic pixel labelling can benefit pedestrian detection.
METHOD
Detector
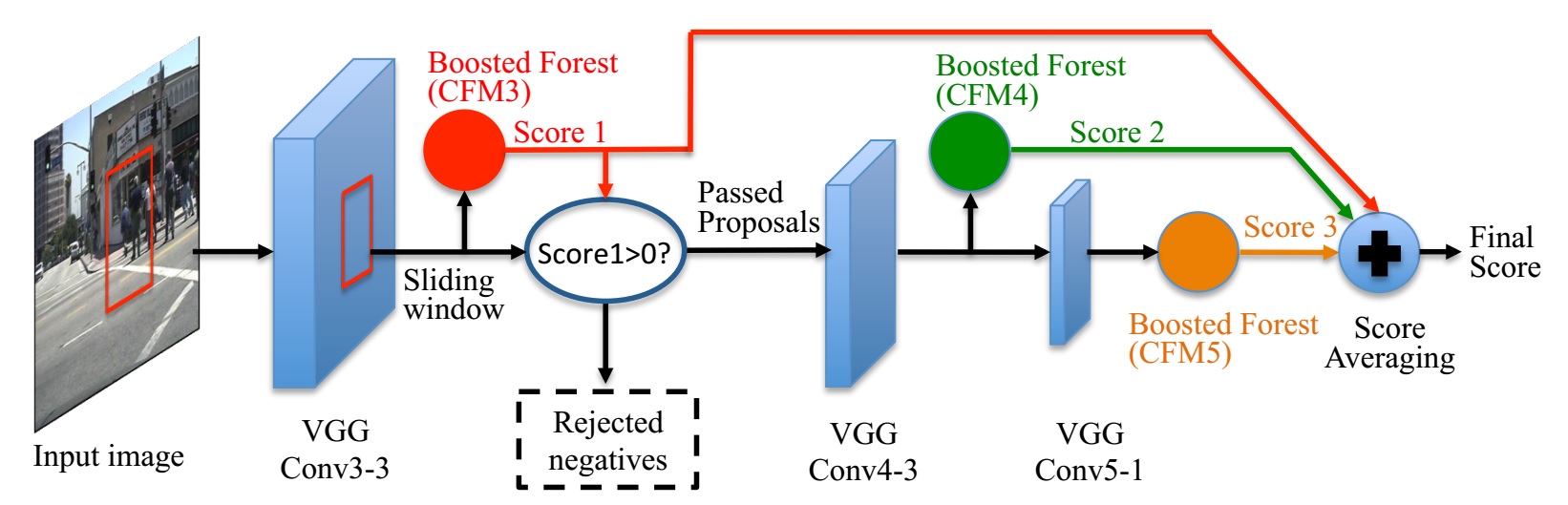
- Three boosted decision forests are trained and used as pedestrian detectors. One of the BDF (noted as CFM3) is trained from the feature map of Conv3-3 in VGG16, which has a downsampling ratio of 4. The second BDF (noted as CFM4) is trained from Conv4-3 and the last one (noted as CFM5) is trained from Conv5-1.
- CFM3 is used in a slide window (with 4 px stepsize) manner to generate high potential proposals.
- the high potential proposals are passed to CFM4 and CFM5. The three scores are averaged as final score.

Combining Pixel Labelling
- A pixel labelling score map is generated using a semantic segmentation network.
- A weighted mask (generated by averaging ground truth annotation of semantic segmentation) is applied to the region of a proposal of the score map to generate the weighted sum of pixel scores.
- The weighted sum and the detector score for the proposal are aggregated as the final score.
SOME DETAILS
Fine-tuning DCNNs with Bootstrapped Data. The input size is set to 128*64, which means the output size for CFM3 is 32x16, CFM4 is 16x8 and CFM5 is 8x4. The fully connected layers have 2048 neurons. In each mini-batch 32 positive samples and 96 negative samples are included. 30k positive and 90k negative samples are used to train the network. The network is first finetuned using the data collected by ACF detector. And then it is further finetuned using the hard negatives.
ADVANTAGES
- Multiple feature maps from one network are used, which shares much computation.
- Traditional features and learning method are combined with DL.
- Several kinds of features are used and they are complemantary.
DISADVANTAGES
- It is too slow because multiple scales of images need to be filtered by a CNN.